


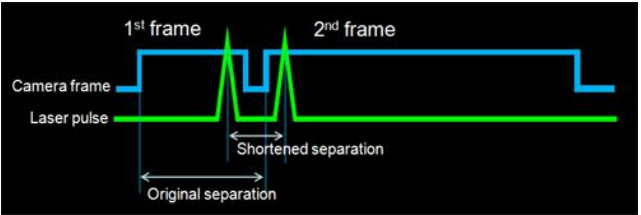
PIV 需要 2 张粒子图像的价格时间是很短的,通常小于 100 微秒的两个粒子图像。帧跨越技术
使两个图像记录的间隔时间可以最小到 1 纳秒。一个双脉冲激光和双快门相机通过时序控制器进行
同步触发。因为双脉冲激光有两个激光头可以独立操作,实际上是受到双快门相机两帧之间的死区
时间长度的限制。
位移和速度计算评价
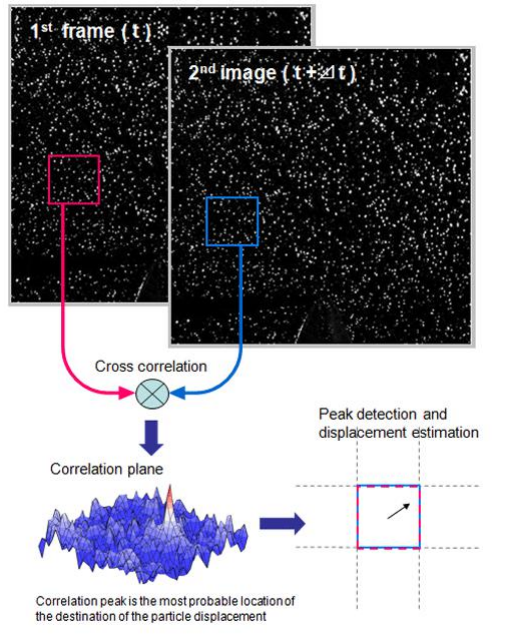
相机成功地记录图像,下一步的就进行 PIV 分析。图像分为小的搜索领域,通常为 32 × 32
像素。这些小的搜索区域被称为 interrogation 窗口。为两个图像互相关应用这些
interrogation 窗口,每个 interrogation 窗口获得相关平面。interrogation 窗口在两个图像
中的位置是相同的(在标准 FFT 互相关,interrogation 窗口转移先进的算法)。
然后应用的峰值检测和位移评价,以获得在每个审讯窗口中的主导位移。由于流量的像素大小
和两个图像之间的时间间隔是已知的,可以计算速度。流量的一个像素的大小是由简单的速度
校准。
测试视场 :350mm×300mm
测试速度 :<800m/s
双脉冲激光器
脉冲能量 100mJ *2,200mJ *2,300mJ *2,500mJ *2;
单脉冲最高频率不低于 15Hz;波长 532nm; 片光源最薄厚度≤ 1mm,焦距 0.5-1.5m 可调
数字相机图像系统
分辨率不低于 2456*×2056(5M);全分辨率采集速率不低于 16fps; 像素尺寸 3.45μm;灰度等级≥12bit;双曝光最小时间间隔≤5us; 包含:50mm /f1.4 镜头;CamLink 接口图像采集卡;532±5nm 专用窄带滤光镜
同步控制器
8 个独立输出通道,时间分辨率为 1ns
压力粒子发生器
料可以为 DEHS、食用油、空心玻璃微珠或者粒径小于微米的固体粉末, 最高供气压力:1 Mpa;
图像处理软件
支持 4 重迭代,可根据判读区尺寸和步长参数,自动实现倍增尺寸迭代计算;具备窗口变形:根据互相关计算窗口和向量参数自动循环调整计算变形后的粒子图像;具备自动向量滤波功能:支持迭代计算、窗口变形以及批处理自动剔除错误向量;具备导航计算功能:可以导入已有参考结果,对后期数据处理提供参考数值,有效减少后期计算时间和提高计算精度。具备自动模型边界模板屏蔽计算技术;集成多目录大批量数据自动处理功能,单目录一次可处理计算不少于 100 个小时或者 10 万个数据文件;支持多线程计算技术:自动根据系统硬件 CPU 个数优化多线程并行加速算法;具有图像平均功能:批量图像平均化处理功能;
粒子图像测速(PIV ,Particle image velocity)系统
PIV 是通过激光片光源测量所设定的平面内速度分布的成像技术,它被广泛用于各种流体动力 学研究,PIV 是 so-called Time of Flight (TOF) 测量技术之一。PIV 技术的基本原理是使用 激光片光源为流场做照明,测量流动可视化的颗粒。一个双脉冲 YAG 激光和双快门相机,能同步记 录 2 张粒子图像, 两张图像的间隔时间非常短,一般小于 100us.
